mobil robototexnik tizimlar
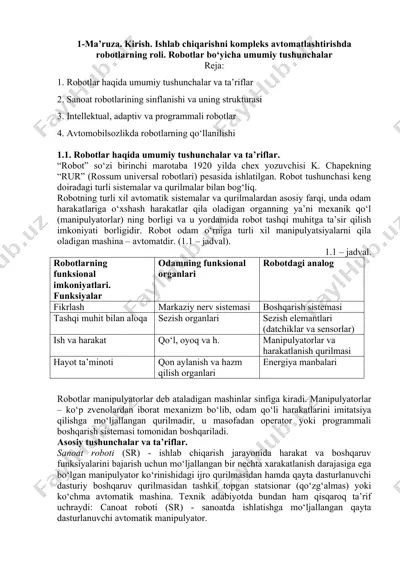
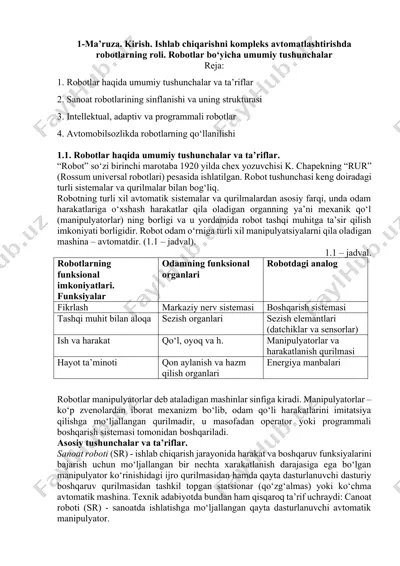
Предварительный просмотр (5 стр.)
Прокрутите вниз 👇



![ltib berish va hokazolar kiradi. avtomatlashtirilgan transport va jamlovchi sistemalarning muhim elementlari – transport mrtlari hisoblanadi. robokaralar. relslar bilan jihozlanmagan pol ustida harakatlanuvchi aravachalar - robokaralar moslashuvchan ishlab chiqarish sistemalarida qo‘llanish uchun yaratilgan [4]. ularning farqli xususiyatlaridan biri shuki, bortlarida kuzatuvchi sistema o‘rnatilgan bo‘lib, bu sistema ishlab chiqarish binosining poli ichida yoki poli ustida joylashtirilgan yopiq induktiv yoki yorug‘lik(nur) aks ettiruvchi (qaytaruvchi) trassalar bo‘yicha programmalashtirilgan harakatni ta’minlaydi. robokaralarning sex ichkarisidagi va sexlararo transporti sifatida qo‘llanilishi umuman olganda bir qator mexanika-yig‘uv ishlab chiqarishlarida quyidagilarni ta’minlaydi: 1) kengligi katta bo‘lmagan yo‘lkalar va o‘tish joylarida yuqori manevrlarni amalga oshirish imkoniyatini; 2) texnologik jarayon o‘zgarganda transport trassasini qayta qurish soddaligini; 3) yuk oqimlarini optimallashtirish imkoniyatini; 4) yaroqsiz holga kelgan transport vositalarini almashtira olish hisobiga erishiladigan yuqori ishonchlilikni, puxtalikni; 5) avtomatik boshqarishdan qo‘l orqali boshqarishga o‘tish imkoniyatini va hokazolarni. robokaralardan foydalanish bilan jihozlarning bekor turib qolishiga barham beriladi, sex ichkarisidagi transport haydovchilari va yuklash-yuk tushirish …](/media/previews/pages/p5_219818.webp "mobil robototexnik tizimlar - Страница 5")
О "mobil robototexnik tizimlar"
10-ma'ruza. mobil robototexnik tizimlar mobil robototexnik tizimlarning vazifalar mobil robototexnik tizimlar (mrt) o‘z navbatida avtomatik boshqariladigan qo‘zg‘aluvchan ob’ektlarni bildiradi. mrtlar harakat marshruti programmasidan tashqari mo‘ljalni programmalashtirilgan avtomatik adreslash imkoniyatiga ham egadirlar. buning ustiga avtomatik ravishda yuklanishlari va yuklarni tushirishlari mumkin. ishlab chiqarish (sanoat) sexlarida ular detallar va instrument (asbob) larni stanoklarga va stanoklardan omborlargacha avtomatik ravishda tashish uchun xizmat qiladilar. bunday mrtlar namunasi o‘rnida robokaralarni keltirish mumkin. bunday qo‘zg‘aluvchan sistemalarda manipulyatsion mexanizmlar o‘rnatilishi mumkin. bu turdagi sistemalar (mexanizm)larga xalq xo‘jaligining turli tarmoqlaridagi m...
Этот файл содержит 8 стр. в формате DOC (130,0 КБ). Чтобы скачать "mobil robototexnik tizimlar", нажмите кнопку Telegram слева.
 DOCX
DOCX
 DOC
DOC
 DOCX
DOCX
 DOCX
DOCX
 DOCX
DOCX
 DOCX
DOCX
 DOCX
DOCX
 DOCX
DOCX
 DOC
DOC
 DOCX
DOCX
 DOCX
DOCX
 DOC
DOC